
Autonomous test platform for factory environment

Background
While the ARPA-project mainly focuses on autonomous maritime tasks, the focus has also been in autonomous and industrial systems including real-time data acquisition and control, manufacturing automation and mobile robots. For these topics, we’ve invested in different technologies and equipment that will support research, development, and education alongside with local companies and universities. Next, these will be described in more detail.
Model-based-design and real-time simulation
The design and manufacture of a remote-controlled and autonomous research vessel is underway at Turku University of Applied Sciences. The concept study of different vessel types led to the selection of an aluminum catamaran model. Alpo Pro Boats Oy, in cooperation with ARPA project staff, has been responsible for delivering the vessel’s hull and cabin. Alpo Pro Boats and other supplying companies have been selected as a supplier through the public tendering processes. The planning and dimensioning of the electric propulsion system has been model-based on using simulations to test and validate critical components, such as electric motors and batteries, before procurement. By simulations, the battery capacity has been designed and the vessel’s operating range at different speeds estimated. This project included the purchase of a real-time target computer and dedicated simulation software selected together with Speedgoat GmbH and MathWorks Inc.
Although the vessel is planned to be remotely controlled and autonomous in the future, the cabin needs efficient heating when instrumentation and measurement work is carried out on-vessel during the cold season. Therefore, local boat heater manufacturer Wallas-Marine Oy has involved in the project by offering the powerful Viking Series heater, which can be operated remotely as well suited to the goals of this project.
Electric powertrain and the information acquired about its operation is essential when verifications are made about the simulation model of the vessel. According to The Work Boat Guidelines, for instance the information about the battery status and state of the charge (SOC) must be visible on the board. The instruments, alerts and trip alarms shall be provided for each electric propulsion system. The required data is available via CAN buses. These use several different protocols, so a display that connects to different buses is necessary, therefore a CAN display manufactured by Epec Oy was selected as a multipurpose unit for the vessel. It enables remote connectivity and has versatile communication interfaces.
This project has produced a lot of new expertise about the model-based design and simulation of electrical and mechanical systems for the research institutes involved and will in the future provide a versatile test platform for companies’ R&D projects when they are developing products and services for the autonomous maritime markets. The further development topics on this test platform can be I.e., various autonomous operation sensor tests with data acquisition and wireless data communication between a shore control center and this simulation model of the vessel.
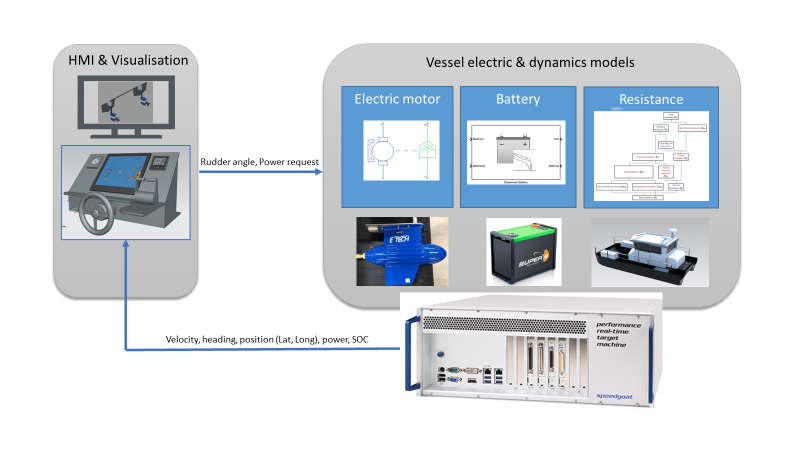
Figure 1. Open-loop test simulation setup to test communication between the control center and the research vessel.
Distributed automation systems for the laboratory
Another goal in this project has been to develop a factory environment that provides a test platform for autonomy, data collection and processing, remote user interfaces, etc. With the support of the project, we’ve invested in factory automation, data communication technology and control room equipment and software, which enables e.g., collecting and processing data from the factory and its various processes and equipment. The Siemens S7 1500 automation system is distributed and connected to substations with Profinet -fieldbuses. This investments support teaching, research, and development, which goal is to produce experts for the industry, who understand the possibilities that modern factory automation and “Industry 4.0” can offer.
With the help of the purchased equipment, the aim is to expand the existing factory automation training environment (#tehdas) to the production side of the factory. This enables the collection of data from real production and equipment, data research and various experiments on how the data could best be utilized in different ways and methods. The factory environment can also be used as a realistic research and test environment for autonomous machines.
The #tehdas-factory, is Turku University of Applied Sciences’ modern development and learning environment for mechanical engineering, which includes, among other things, a machine shop, an automation laboratory, and other facilities. The factory is also used for real production.
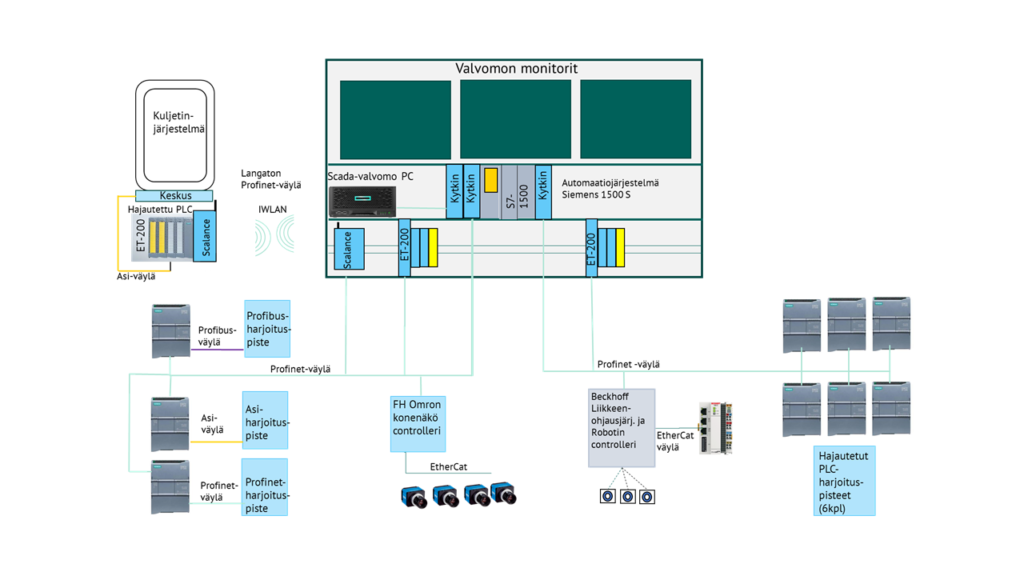
Figure 2. The Scada system of automation laboratory includes the system parts which are shown in the system diagram.
Machine-to-machine connection via MQTT
One project task is machine-to-machine connectivity in industrial automation. MQTT, that is a standard for IoT messaging, was selected as a means of communication. The goal was to have several machines communicating with each other: UR5e industrial robot, Omron LD-60 mobile robot and Siemens PLC (programmable logic controller), among other things in the future.
MQTT connector URCap plugin for Universal Robots enables the robot to communicate over MQTT. Omron LD-60 does not have an MQTT option, but the robot can be accessed via Omron proprietary ARCL (advanced robotics command language). Message conversion between MQTT and telnet was done with Node-RED, an open-source visual programming tool for connecting hardware devices, APIs and online services.
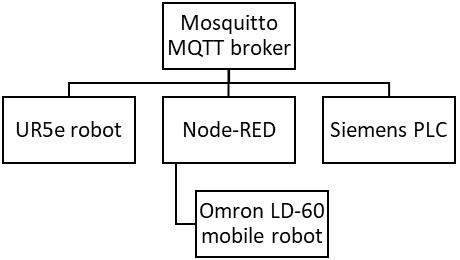
Figure 3. Schematic picture of MQTT structure
Advanced Machine vision
Autonomous systems, both factory automation and mobile robots, depend on their ability to recognize and measure objects in the environment. For that purpose, we’ve invested in a high-performance structured light-based 3D camera from Ensenso. This camera is, among other things, suitable for pick-and-place applications, which are common and important tasks for different industries. Accurate three-dimensional measurement and classification enables very demanding pick-and-place applications, for example, picking small or different-sized pieces that are mixed up in a box, or picking agricultural products. This camera, designed for environments with demanding conditions, can be installed on a mobile robot or work machine or in an industrial robot work cell. In addition to pick-and-place applications, other significant applications, for which the camera is also suitable, include measuring, quality assurance and assembly.
However, the precise measurements that the camera enables are only a good start! The challenges that follows are related to classification and control algorithms, and there is plenty to experiment and develop in these areas. The advanced software included in the camera procurement enables the implementation of demanding applications, but one of the reasons for choosing this camera has also been the camera’s combability with the open-source ROS framework (Robot operating system). ROS combines the different themes and procurements in the ARPA-project, and it provides a robust data transmission architecture, software tools and libraries that enable the research and development of autonomous applications. ROS includes e.g. a set of advanced open-source machine vision software libraries and tools.
The goal of the procurement is to develop expertise related to machine vision, robotics, and autonomy, as well as to provide companies and educational institutions in the region with an advanced and high-performance research platform for researching and developing demanding applications. The goal is, when experience and learning are gained, that such services can be provided to the companies where for example, groups of students could experiment the machine vision-assisted handling of the company’s products. This also involves the design and testing of suitable grippers. Designing and testing such applications is a laborious and demanding task, and that’s why this model could work well as a business-university cooperation model – the students gain experience, and the company gets valuable information and an understanding how the technology could be applied to their production processes.

Figure 4. Ensenso 3D-camera based on structured light

Figure 5. Demanding application example: picking agricultural products

Figure 7. Demanding application example: picking objects in slightly different orientations and levels

Figure 8. A common but demanding application: pick-and-place of boxes in different orientations
Mobile robots for learning autonomy
There is a lot to learn in autonomous machines. Various inexpensive mobile robots designed for education and research have been procured, which in addition to a mobile platform contain a relatively powerful computing unit and various sensors. Although these robots may seem simple, with their help it’s possible to learn and develop skills required in autonomous systems, e.g., using the open-source ROS program library (Robot operating system). ROS combines the different themes and procurements in the ARPA-project, and it provides a robust data transmission architecture and other software tools and libraries that enable the research and development of autonomous applications.
A Duckietown robot, which originated from a project at MIT in 2016, has also been utilized in the ARPA project. The robot and it’s educational platform were designed to be small-scale and cute, yet still preserving the real scientific challenges inherent in full-scale real autonomous robot systems. The motto of the Duckietown robots is “State-of-the-art Robotics and AI made tangible, accessible, and fun!” Several reputable educational institutions use Duckietown robots.
High-quality learning material, which the Duckietown community develops and maintains, is also of great importance. There is plenty of free, open, and high-quality teaching material and even courses available. The Duckietown community is backed by the non-profit Duckietown Foundation.
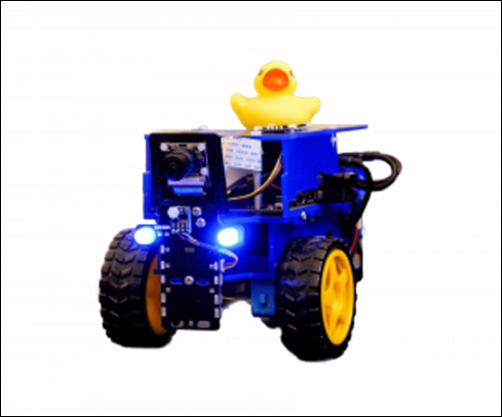
Figure 9. Don’t let the playful appearance fool you, and with the cute Duckietown-robots you may tackle the same real scientific challenges than inherent in a full-scale real autonomous robots.

Figure 10. With Duckietown you can build your own robot, follow along with our lectures and interact with a global community of learners.

Figure 11. Useful miniature city training sets are sold separately.
In conclusion, this project not only enhances the understanding of automation technology among students and staff, but also provides a valuable opportunity for companies and students to collaborate and tackle today’s technical challenges.
Authors:
Antti Nousiainen, Project Engineer, Turku University of Applied Sciences
Ari Putkonen, Principal Lecturer, Turku University of Applied Sciences
Sakari Koivunen, Senior Lecturer, Turku University of Applied Sciences
Teppo Mattsson, Senior Lecturer, Turku University of Applied Sciences
Teemu Toivola, Project Assistant, Turku University of Applied Sciences
Mika Laurén, Senior Lecturer, Turku University of Applied Sciences